



萌芽研究
高加速・高精度2自由度球面ボイスコイルモータの開発

2025年6月掲載
| 研究者 | 名古屋大学 部矢 明 准教授 |
|---|
※上記肩書きは、採択時のものです
また本HPでの当該情報の公開についてご了承をいただいている題目のみ掲載しています
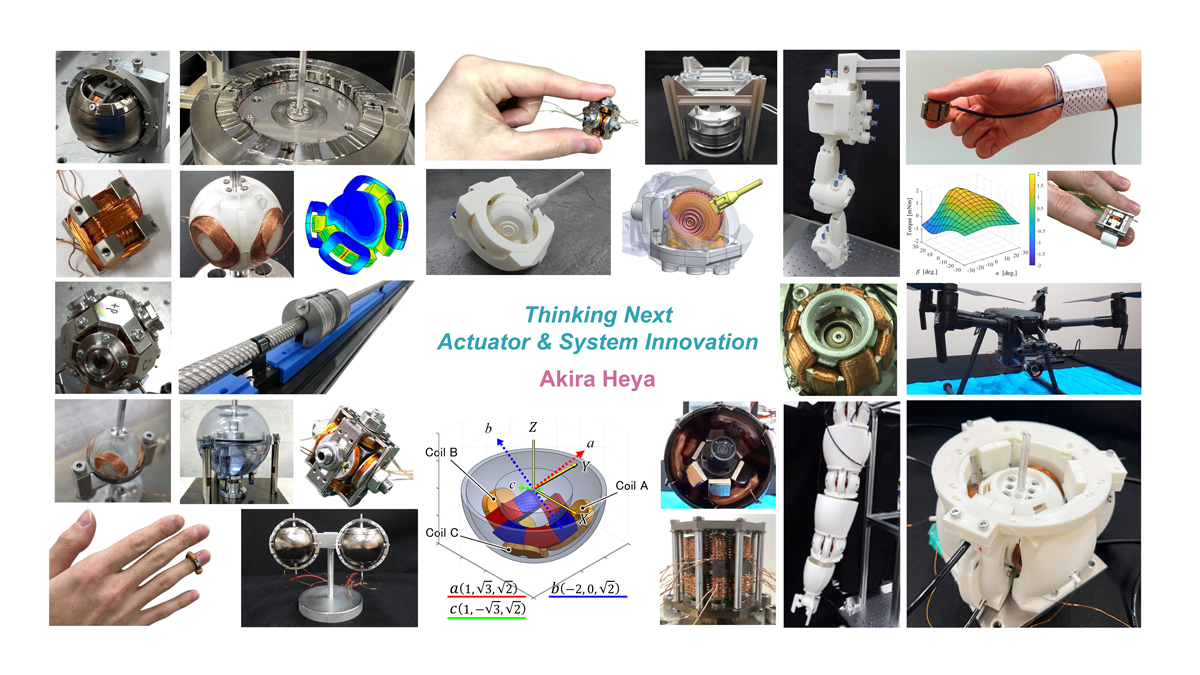
新たな機械システムを生み出すことを目的に、2コイルだけで2自由度回転を実現する新モータを提案し、試作機による実機検証を実施しました。
研究者ネットワーク構築も魅力
Q.「パワーアカデミー研究助成」に応募したきっかけをお教え下さい。
尊敬する若手の先生からパワーアカデミー研究助成についてご紹介いただき、「ぜひ応募してみてはどうか」と勧められたことがきっかけです。研究助成にとどまらず、産学連携の促進にも力を入れている点や、自身の研究内容とパワーアカデミー研究マップとの関連性から、応募を決意しました。また、成果報告会を通じて研究者同士のネットワークを構築できる点にも大きな魅力を感じました。
機械を駆動源から見直す
Q.研究内容をお教え下さい。
私は「機械を駆動源から見直し、アクチュエータ技術の革新から新たな機械システムを生み出す」ことをモットーに、下記の研究を進めています。
① 高精度・高速かつ小型な多自由度回転機構の実現
電磁力や空圧力またはそれらのハイブリッド駆動により、1台のみで多自由度回転可能なモータを提案しており、ドローンやロボットへ応用することで従来機構では到達できない高性能化の実現に挑戦しています。
② 脱炭素社会実現のための極低温電磁制振機構の実現
水素は-253℃で液化し、800分の1の体積となるため供給コストを大幅に削減可能ですが、極低温では従来制振要素であるゴムや油が使用できないため、振動が問題となります。そこで、電磁力によって液化水素供給時の振動を抑える新制振機構により、安全かつ保守性の高い水素供給技術の実現に挑戦しています。
③ 高精度・高速かつ高出力な半導体製造装置のための直動機構の実現
磁力によって回転・直動変換を行う高性能磁気送りねじアクチュエータを提案しており、半導体製造装置の直動機構への応用による製造効率の向上に挑戦しています。
④ 3次元振動モータによる3次元フォースフィードバックの実現
1台であらゆる方向へ振動可能な3次元振動モータとそれを利用した力覚提示法を提案しており、誰もがどこへでも持ち運びできる3次元フォースフィードバック技術の確立に挑戦しています。
⑤ アクチュエータの状態監視による故障診断
機械が故障する予兆をアクチュエータの駆動情報から読み解き、今どんな状態変化が起こっていて、いつ故障するのかを予測する技術の高度化に挑戦しています。
小型ロボット眼球の応用研究へ
Q.現在までの研究成果と今後の展開についてお教え下さい。
パワーアカデミー研究助成では、ボイスコイルモータから着想を得て、2コイルだけで2自由度回転を実現する新モータを提案し、試作機による実機検証を実施しました。今後は、その簡素構造を活かして、小型ロボット眼球としての応用研究を進めていく予定です。
多くの出会いに感謝します
Q.最後にひとことお願いします。
パワーアカデミー研究助成の研究課題としてご採択いただき、自由な発想のもとで研究を進める貴重な機会をいただきました。また、成果報告会や産学連携のコミュニケーションを通じて、多くの方々との出会いにも恵まれ、大変有意義な時間を過ごすことができました。改めて、心より感謝申し上げます。