




後編は、優勝&ロボット大賞に輝いた、仙台高専のロボット"OR(オーアール)"のヒミツに迫ります。"OR"の特徴やこだわり、そしてどのように電気工学が貢献しているのかを語っていただきました。
ロボコン2011ルール概要
2011年のロボコンは、アメリカンフットボールをモチーフにした「ロボ・ボウル」。試合はオフェンスとディフェンスに別れて行います。オフェンスチームのロボットが二足歩行でキャッチゾーンに移動。スローアーが2メートル離れた位置からボールをパス。ボールを捕球したロボットはフェンスの外で待つレシーバーに向かってパスします。一方、ディフェンスチームは、ロボットでそのパスを阻止します。ディフェンスロボットが変形できるのは高さ5メートル。様々な壁をつくって妨害することができます。1分30秒の攻撃時間が終わると攻守交代。より短い時間でタッチダウンを決めたチームの勝ちとなります。詳細は、高専ロボコン公式HPをご覧ください。全国大会でミラクル・タッチダウンを何度も見せた「OR」

オフェンスロボット。ふたつのアームが取りつけられ、同時にオーバースローで投げます。
仙台高専のロボット「OR」は、全国大会で、圧倒的なタイムを出して勝ち進み、優勝を果たしました。オフェンスでは、多くのチームがタッチダウンまで10秒以上かかる中、すべて10秒以下で成功。ほとんどノーミスでした。群を抜いたロボットの完成度とパフォーマンスで、誰もが認める優勝&ロボコン大賞だったと言ってよいでしょう。仙台高専の皆さんに、オフェンス、ディフェンス、各々のロボットをPRしてもらいました。
オフェンスロボットは、素早い二足歩行が特徴です。「歩きの安定性では他を圧倒していたと思います。全国、地区大会共々、他チームでは歩行ゾーンでやり直しということが見受けられました。うちは、ほぼミスなく安定して歩行ができました」。また、2つのボールを同時に投げられることも特徴です。「2つの射出機構(投球機)を装着しています。その投球機にはゴムを使っていて、去年のAruyo=Aruyo(アルヨアルヨ)の経験が活かされています。絶対にどちらかのボールはキャッチさせるという意気込みでやりました」(橋本さん)。

足が歩行と連動したカムを取り付けて、上下運動のバランスを保つようにした「安定機構」です。
一方、ディフェンスロボットは、高さ5mまで一気に風船が膨んでディフェンスを行います。「地区大会はブロワーを使っていましたが、膨らむまで12~13秒もかかりました。そこで、全国大会では、ブラシレスモーターに替えて、約2秒で膨らむようにしました。ブラシレスモーターを使っている高専は、全国大会ではうちを含めて3校だけです」(磯崎さん)。
こだわりの安定した二足歩行と、どこからも投げられる投球機

形が不安定なアメフトボールをかっちり受け止め、投げられるアームです(櫻井さん)。
仙台高専の皆さんに、ロボット技術の詳細について伺いました。優勝の決め手となった、安定した二足歩行と投球のメカニックを担当したのは櫻井さんです。「二足歩行の安定性を上げるために、オリジナルの機構をつくったのがこだわりですね。上下方向を押さえる機構と左右方向を押さえるための機構を設置しました。上下方向に関しては、足が歩行と連動したカムを取り付けて、上下運動のバランスを保つようにしました(安定機構)。左右も、基本的に4カ所、足が左右にずれてしまうのを本体側から押さえつける機構としました」。どの辺に苦労があったのでしょうか。「ぶれない程度に押さえければいけないのですが、押さえつけ過ぎると、歩行する際の抵抗が生まれて、足の動きが鈍くなってしまいます。そのバランスに苦労しました」。 。
また、投球の秘密も明かしてくれました。「多くの高専は、形が不安定なアメフトボールなので、ロボットがキャッチする際に、ボールの方向の形を整えてから投げられるような投球機にしていました。一方、仙台高専のロボットは、ボールがどんな方向で投球機から投げても、同じ距離で飛ぶようなものにしています。大変難しくて、公民館の練習は、ほとんどこれに費やしましたね」。これらは、ボールが離れる瞬間をスーパースローで撮影し改善をくりかえし行ったそうです。

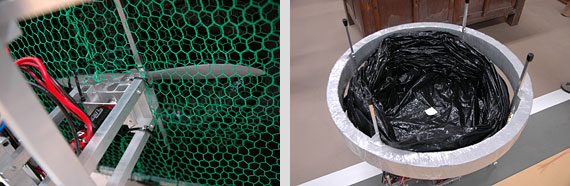
(写真左)手前のブラシレスモーターでプロペラをまわして、(写真右)すると、ぺっちゃんこの風船が約2秒で。。。風船を膨らまします。
強力ブラシレスモーターを使って、最強砲をブロック
続いて、ディフェンスロボット。担当は、磯崎さんです。「ほとんどの高専は、釣竿を使っているのですが、私たちはラジコン用のプロペラを、先ほど言ったブラシレススモーターで回しています。これにより、強力な風を送ることができ、袋が一瞬で高さ5mまで広がります。ただ、このブラシレススモーター、性能はいいのですが、制御が非常に難しいのです。そこで、専用のコントローラーを購入しました。
(写真左)手前のブラシレスモーターでプロペラをまわして、(写真右)すると、ぺっちゃんこの風船が約2秒で。。。風船を膨らまします。

5メートルまで膨らみます。手で押さえているところが福島高専の"最強砲"をブロックしました(磯崎さん)。
また、通信に使ったBluetoothとリンクを行うようにするなど、様々な工夫を行いました」。この努力は、見事に決勝戦という一番大事な場面で実りました。決勝まで正確なパスで勝ち抜いてきた福島高専の"最強砲"を、見事にブロック。優勝を決める大舞台で最高のパフォーマンスを見せました。ちなみにこのブラシレスモーター、桜庭先生の反対を押し切って採用したそうです。
史上初の優勝&ロボコン大賞受賞ロボットには、電気工学が満載
電気工学が関わる部分で工夫したポイントは、どこだったのでしょうか。担当は、橋本さんです。まずは電気回路について話してくれました。「去年の"Aruyo=Aruyo(アルヨアルヨ)"ですが、ロボコン大賞はとりましたが、非常停止スイッチやモーターの不具合などが起きていました。そこで今年は、回路自体の銅の部分をできるだけ太くするなど、電流対策を強化しました」。ロボットの心臓とも言える電気回路には、櫻井さん、磯崎さんのふたりから絶対の信頼があったそうです。「電気回路がダメになるとロボットは動きません。他の高専ではそうしたことが見受けられましたが、自分たちのロボットは何の問題もなく動くので頼もしかったです」(櫻井さん)。「回路の誤作動がないことは信頼しているので、機械に集中できました」(磯崎さん)。このふたりの反応に橋本さんは、「担当教官の桜庭先生が電気系の先生なので、回路トラブルが許されないんですよ(笑)」と照れていました。
また通信に関しても「Bluetoothでやっているのですが、チェックサム(check sum)という確認方法を導入しました」。さらにバッテリーも「3種類使っています。電流使用量が少ない基板には006Pという普通の乾電池、回路を動かすためには容量の少ないリチウムポリマー電池(330mA/h)、モーター駆動用の大容量リチウムポリマー電池(2,500mA/h)です。全体の容量制限があるので、必要なところに最適なバッテリーを使用することで対応しました」(橋本さん)。こうした様々な工夫は、桜庭先生もうならされたそうです。
「電気工学、特に電気回路は、ロボットのみならず全ての電気機器の基本です。これがしっかりしないと全てがダメになりますね」仙台高専のロボコンチーム3人は、電気工学についてこのように語ってくれました。
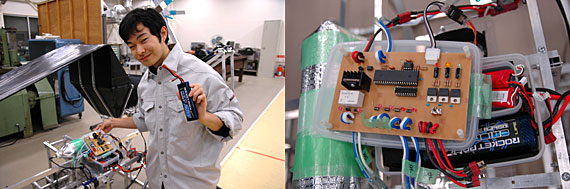
こだわりの電気回路(左手)と、バッテリー(右)です(橋本さん)。

今年はマシン2台とも操作ボタンが少なかったので、できるだけ軽くするためにコントローラーも自作しました(橋本さん)。
仙台高専/全国大会優勝までの軌跡
- 一回戦 VS米子高専 先攻/タッチダウンタイム10秒で勝利
- 準々決勝 VS奈良高専 後攻/タッチダウンタイム8秒で勝利
- 準決勝第一試合 VS北九州高専 後攻/タッチダウンタイム8秒で勝利
- 決勝 VS福島高専 後攻/タッチダウンタイム 10秒で勝利
編集後記
東日本震災を乗り越え、優勝&ロボコン大賞という快挙を成し遂げた仙台高専ロボコンチーム。東北の人々を励まし勇気づけた彼らのチャレンジは、2012年のロボコン大会へ続きます。史上初の3年連続ロボコン大賞は実現するのでしょうか。非常に楽しみです!
(パワーアカデミー事務局)
