



岐阜工業高等専門学校 「ZIN」
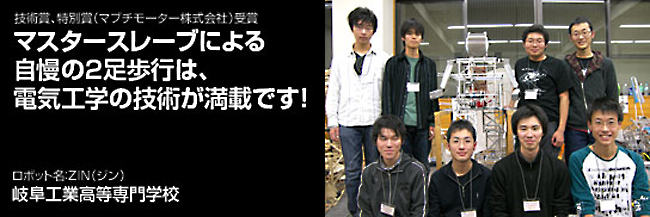
ASIMO(アシモ)顔負けの、2足歩行

岐阜高専の一回戦は、サプライズからスタートしました。ASIMOを参考にロボットを作ったという岐阜高専ですが、対戦相手がいないので、なんとASIMOと対決をするという展開となったのです。この突然の出来事に観客は大喜びでした。
そこでASIMOについて伺ってみると、「ASIMOは意識しましたが、どちらかというと見た目です。身長や歩行の姿などは真似しましたが、技術は総て僕達のオリジナルです。もちろん、一緒に競技できたのは心から嬉しかったですよ」と岐阜高専の皆さんは語ってくれました。そんな自信溢れるコメントと同様、競技のパフォーマンスもASIMOにひけをとらない素晴らしいものでした。

多足歩行ゾーンでは、卵型ロボットで登場。そして、卵から人型ロボットが登場して、手を振って観客の声援に応えるというパフォーマンスで会場を沸かせました。さらに、まるでASIMOのような人間並みの2足歩行で見事、完走!決勝戦後のエキシビジョンマッチでも観客を楽しませてくれました。
高度なモータ制御による、マスタースレーブ

「2足歩行に一番力を入れました。もっとも製作に力を入れられる夏休みのほとんどを、人型ロボットに費やしました」そう岐阜高専の皆さんが語る自慢の2足歩行に、特に貢献したのが、電気工学に関わるモータ制御の技術です。
「僕達のロボット動作は、マスタースレーブという技術で行っています。マスタースレーブとは、遠隔でロボットアームを操作する代表的な方法ですが、特に重要なのがモータの角度制御です。今回はモータの軸に円盤をつけて、フォトイントラクタというセンサを取り付けて角度制御を行いました。これによって、人っぽく歩行できることが可能になりました」ホンダのASIMOに劣らない歩行や、会場を沸かせた手を振るパフォーマンスには、電気工学の技術が隠れていたのです。また、軽量化をはかるため、モータはたった一個にして、その選定には大変神経を使ったそうです。
最後に、大会前に配った事前のアンケートに対して、学生のひとりから「将来は電気工学のエンジニアとして活躍したいです」という答えを頂きました。
